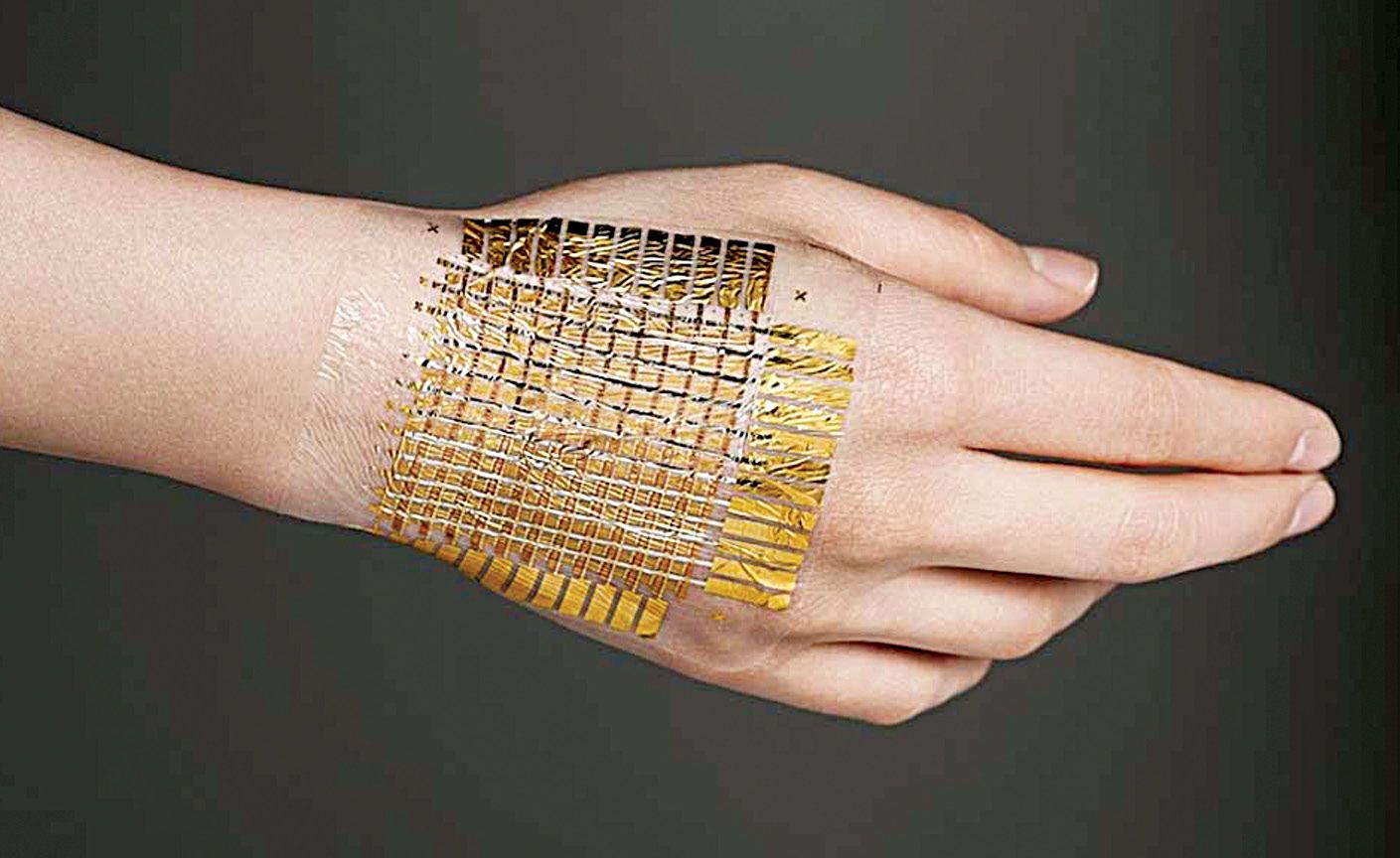
Vai robotizēta roka, līdzīga Optimus vai 1X , varēs justies kā mūsu pašu roka? Kembridžas Universitātes un Londonas Universitātes koledžas pētnieki uzskata, ka ir spēruši svarīgu soli šajā virzienā. Viņi ir izstrādājuši mākslīgu ādu, kas sastāv no viena elastīga materiāla, kas spēj noteikt temperatūru, spiedienu, griezumus un vairākus vienlaicīgus pieskārienus. Un tas viss bez cietām slāņiem vai sensoriem, kas izvietoti pa visu virsmu. Un visdaudzsološākais, pēc tās radītāju teiktā, ir tas, ka tā var pielāgoties sarežģītām formām un solās būt salīdzinoši vienkārša ražošanas procesā: vienkārši izkausējiet to, ielejiet silikona formā, izņemiet iekšējo pozitīvo daļu un uzvelciet kā cimdu uz robotizētu konstrukciju.

Šīs tehnoloģijas pamatā ir vadošs hidrogēls, kas kopā ar elektriskās impedances tomogrāfiju (EIT) ļauj nepārtraukti reģistrēt notikumus uz tā virsmas. Stimula ietekmē — pieskāriens, siltums vai spiediens — lauki mainās. Sistēma nosaka ne tikai stimula veidu, bet arī tā atrašanās vietu, kā arī vides apstākļus. Viss tiek interpretēts ar mašīnmācīšanās palīdzību, kuras kavēšanās ir atkarīga no aktīvo kanālu skaita, skaidro raksta autori, kas publicēts žurnālā Science Robotics.
Mīksta membrāna, miljoniem datu
Labākais sistēmas piemērs ir dabiskā izmēra robota roka, kas pilnībā pārklāta ar šo mākslīgo ādu. Tā vietā, lai izmantotu izkliedētus sensoru, tā izmanto tikai 32 elektrodus, kas novietoti uz plaukstas locītavas. Šāda konfigurācija ļāva iegūt vairāk nekā 1,7 miljonus informācijas kanālu, kas tika iegūti no 863 040 dažādām kombinācijām.
Testēšanas laikā roka tika pakļauta dažādiem stimuliem: cilvēka pirkstam, termiskajam zondam, skalpeļa triecienam. Visos gadījumos tā spēja atpazīt mijiedarbības veidu un lokalizēt to ar vidējo precizitāti aptuveni 25 milimetri visā tās virsmas platībā. Jāatzīmē, ka katram stimula veidam nav nepieciešams atsevišķs sensors. Membrāna reaģē atšķirīgi atkarībā no kontakta intensitātes vai rakstura, un tieši mākslīgā intelekta modelis izvēlas visatbilstošāko signālu no simtiem tūkstošu iespējamo.
Papildus taustes sajūtām šī āda spēj uzraudzīt apkārtējo vidi. 100 stundu ilgā testā sistēma reģistrēja temperatūras svārstības no 19 līdz 25 °C un relatīvo mitrumu no 38 līdz 72 %, kā sīki aprakstīts Kembridžas Universitātes oficiālajā preses relīzē . Tas viss ir iespējams, pateicoties konstrukcijai bez cietām detaļām, kas atvieglo tās integrāciju protezēs, tehniskajā apģērbā, vadības virsmās un sadarbības robotos. Lietošanas jomas sniedzas no rehabilitācijas un attālās izpētes līdz automobiļu rūpniecībai.
Protams, šī izstrāde nesākas no nulles. Pēdējos gados mēs esam redzējuši arī citus piedāvājumus, kas vērsti uz robotu jutīguma nodrošināšanu, piemēram, sintētiska āda, kas spēj reproducēt sāpes , sintētiska āda, kas, kā apgalvots, ir maksimāli tuvu cilvēka ādai , vai āda, kas spēj pašatjaunoties un pārstrādāties . Kembridžas un Londonas Universitātes koledžas darba izšķirīgā iezīme ir radikāli vienkāršota pieeja: vienots elastīgs slānis bez mehāniskām sastāvdaļām, kas centralizē visu jutīgumu un interpretē to ar programmatūras palīdzību.
Joprojām ir neatrisinātas uzdevums: uzlabot izšķirtspēju vietās, kas atrodas tālu no elektrodu, un palielināt hidrogēla ilgtermiņa stabilitāti. Taču, šķiet, notiek paradigmas maiņa. Viss liecina, ka ir tikai laika jautājums, kad mēs redzēsim robotus, kas ne tikai būs attīstītāki mobilitātes un mijiedarbības ziņā, bet arī izskatīsies un jutīsies fiziski tuvāki mums. Šāda mākslīgā āda paver ceļu jaunai mašīnu paaudzei, kas ne tikai veic uzdevumus, bet arī “jūt” apkārtējo vidi. Tomēr mēs esam tālu no reālisma līmeņa, kas piedāvāts filmā „Detroita: Kļūsti par cilvēku”.



